
A tribus tempus asynchronousmotorgenus inductionis motoris est, quae simul a 380V tria phase AC currenti coniungens potens est (diferentiae Phase 120 graduum). Ob hoc quod rotor et stator campus magneticus circumducitur asynchronous motor trium phase in eadem directione et in diversis velocitatibus, est rate lapsus, unde dicitur motor asynchronous three-phase.
Celeritas rotoris motoris trium phase asynchroni minor est quam celeritas campi magnetici rotationis. Rotor sinuosus vim electromotivam et venam generat propter motum relativum cum campo magnetico, et cum campo magnetico reciproco ad generandum torquem electromagneticum, energiam transmutationem assequendam.
Cum uno tempus asynchronousmotorumTres tempus asynchronousmotorummelius operandi effectum habere et varias materias servare possunt.
Secundum diversas rotor structuras, tres periodi motores asynchroni in caveam generis et vulneris genus dividi possunt.
Motor asynchronous cum rotor cavea simplicem structuram, operationem certam, levem pondus et pretium humile habet, quod late usus est. Praecipuum eius incommodum est difficultas velocitatis expers.
Rotor et stator vulneris tres phase asynchronos motores sunt etiam tribus temporibus ambages instructi et cum rheostat externa per annulos lapsus perterget conexi. Aptans resistentiam rheostatae agendi motoris initium emendare potest et celeritatem motoris accommodare.
Principium laborantis motoris phase asynchronous
Cum symmetrica tria phase alterna currenti applicatur ad tres phases statoris flexus, campus magneticus gyratorius generatur, qui per spatium rotundum statoris et rotoris synchroni velocitatis interioris circumagatur, n1.
Cum campus magneticus revolvatur in celeritate n1, rotor conductor in principio statarius est, ideo conductor rotor secet campum magneticum statorem rotatum ad vim electromotivam inductam generandam (directio vis electromotivae inductae a dextra manu constituta. imperare).
Ob brevem circuli rotoris conductoris ad utrumque finem per circulum brevem, sub actione vis electromotivae inductae, rotor conductor venam inductam generabit quae basically in eadem directione cum vi electromotiva inducta generabit. Current conductor rotoris portans vim electromagneticam in campo statori magnetico (directio virium determinatur utens regulae sinistrae) subiecta est. Electromagnetica vis electro magneticam torquem generat in scapo roto- rico, agitans rotor ad gyrandum in directione campi magnetici rotantis.
Per analysim praedictam, concludi potest principium operativum motoris electrici hoc modo: quando tres ambages statoris statoris motoris (singulis cum 120 gradu differentiae electrici) aluntur tribus temporibus symmetricis alternantibus currentibus. , ager magneticus revolvens generatur, qui curvum rotor secat et venam in curvis rotoris inductam generat (rotor flexus circumclusus est circuitus). Current rotor conductor portans vim electromagneticam generabit sub actione statoris campi magnetici circumagenti, Sic, torques electromagneticus formatur in scapo motorio, movens motorem ad gyrandum in eadem directione cum campo magnetico revolvente.
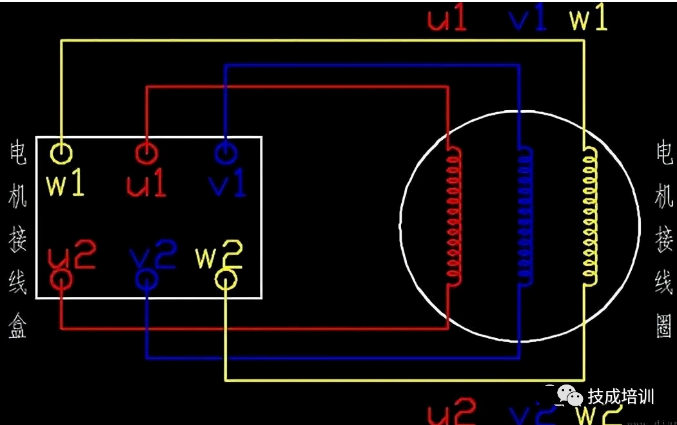
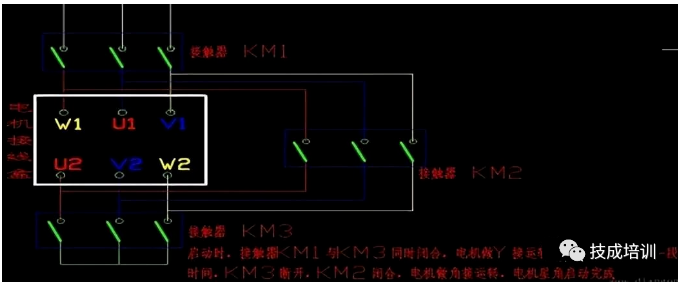
Wiring tabula trium tempus asynchronous motricium
Basic wiring trium tempus motorum asynchronous:
Sex filis ex flexuoso motoris asynchrono phase asynchrono in duos modos fundamentales dividi possunt: della nexu della connexio et stella connexio.
Sex fila = tria flexuosa motrices = tria capita desinentia + tria caudae extrema, multimetri connexionem inter caput et caudam extremitates eiusdem flexae, ie U1-U2, V1-V2, W1-W2.
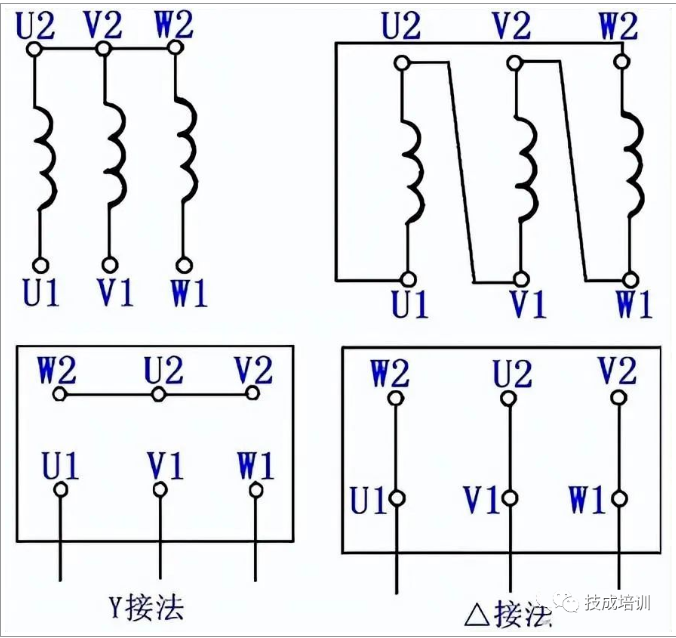
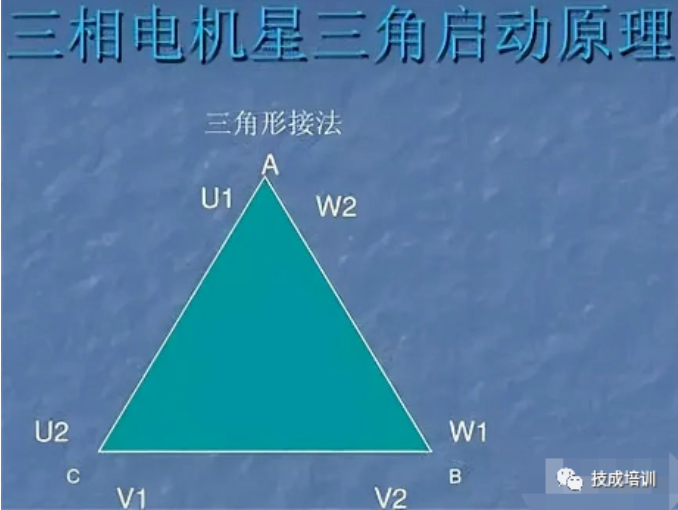
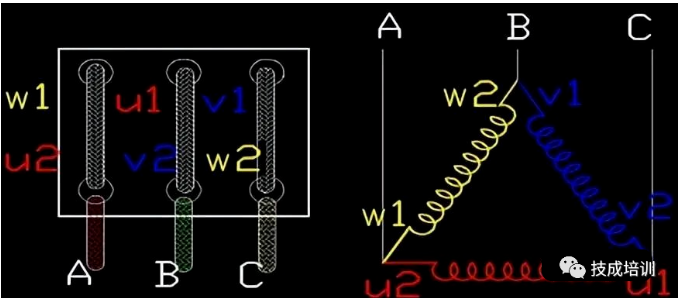
1. Connexio trianguli della methodo ad tres periodos asynchronos motores
Triangulus della connexione modus est iungendi capita et caudas trium flexuorum in ordine ad formam trianguli, ut patet in figura;
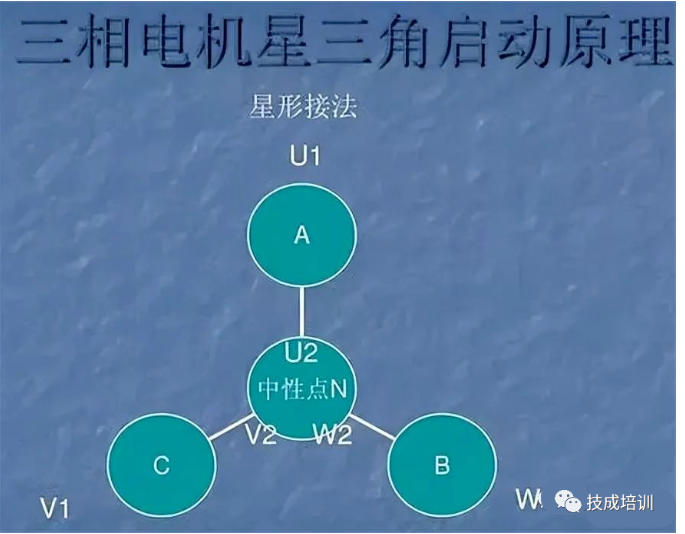
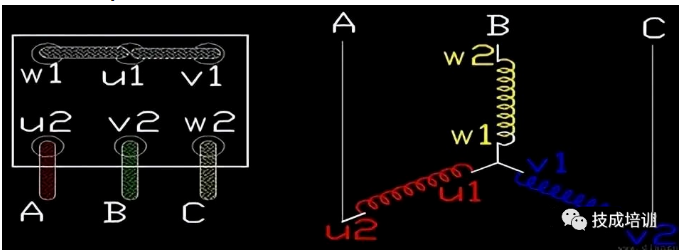
2. stella nexum modum pro tribus temporibus asynchronous motoribus
Connexionis stellae modus est caudae vel capitis extremitates trium flexuosum coniungere, et alia tria fila pro viribus iungi. Connexionis modum ut in figura patet:
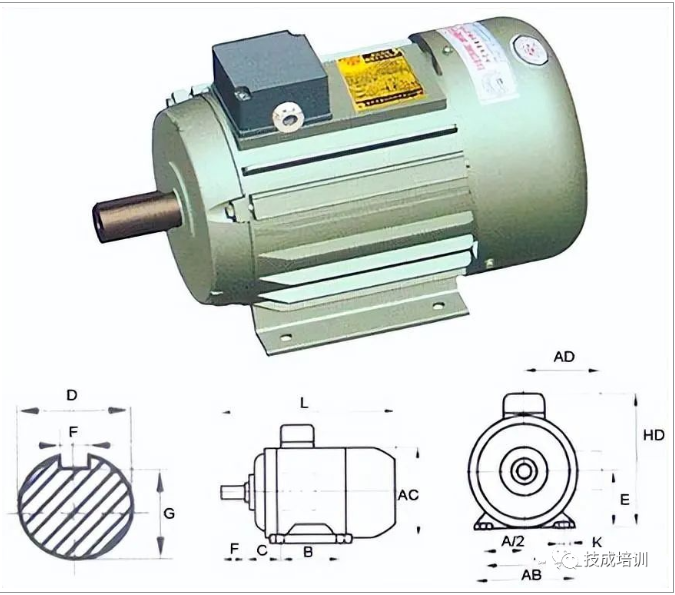
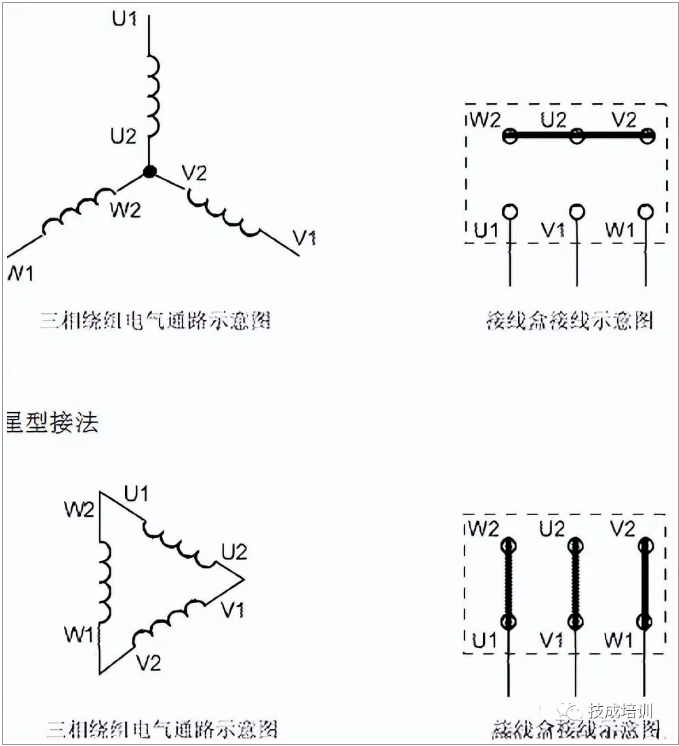
Explicatio Wiring Tabula Trium Phase Asynchronous Motor in Figuras et Text
Tres tempus motricium coniunctas archa
Cum tribus phase asynchronis motoriis coniungitur, nexus modus connexionis in arca coniunctas est hoc modo:
Cum tribus phase asynchronis motoriis est angulus connexus, nexus modus connexionis capsulae juncturae talis est;
Modi nexus sunt duo motores asynchroni in tres phase: connexio stella et nexus triangulus.
Modus trianguli
In gyris anfractibus cum diametri filo et eadem intentione, nexus stellae methodus ter minus per phase (1.732 vicibus) habet et ter minorem vim quam methodus connexionis trianguli habet. Connexio methodi motoris perfecti fixa est ad intentionem 380V resistendi et fere apta modificationi non est.
Connexio methodi solum mutari potest cum tres gradus intentionis tres gradus a normali 380V differt. Exempli gratia, cum gradus trium-phase voltage est 220V, mutans connexionem stellarum modus primigenii tria- phase intentionis 380V ad triangulum nexum modus applicabilis potest; Cum tres gradus intentionis 660V gradus est, principale tres-phases intentionis 380V della connexio methodus connexionis stellae mutari potest methodus, et eius potentia immutata manet. Generaliter motores humilium potentiae sunt stellae connexae, cum motores altae potentiae sunt della connexa.
In intentione aestimavit, motor della connexa adhibenda. Si mutatur ad stellam coniunctam motorem, pertinet ad operationem voltagenum reductam, consequens diminutionem motoris virtutis et incipientis currentis. Incipiens summus potentiae motoris (connexio della methodo), vena altissima est. Ut ictum currentis in linea incipientis reducere, fere initium gradatim adoptatur. Una methodus est originalis della connexione methodus mutandi nexum stellandi methodus incipiendi. Postquam nexus stellae modus incepit, connexio della via convertitur retro ad modum operandi.
Wiring tabula trium tempus asynchronous motricium
Physica schematis de transpositione et transpositione linearum motorum trium temporum asynchronorum:
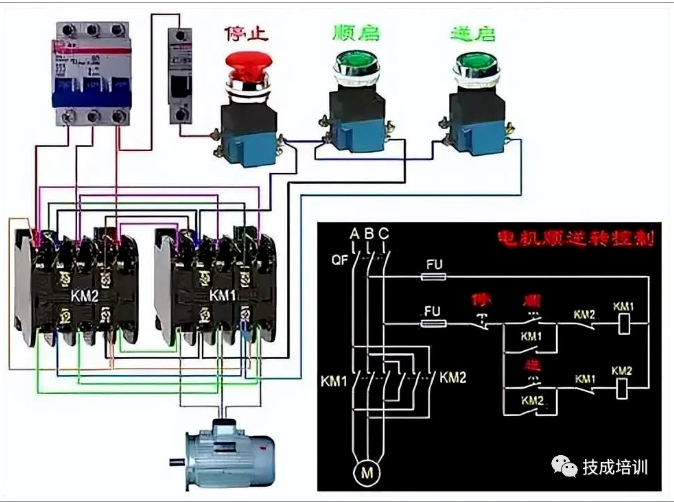
Ad imperium motoris deinceps et vicissim assequendum, quaelibet duo incrementa virtutis suae copia adaptari possunt relativa inter se (vocamus eam commutationem). Fere, V tempus mutatum est, et U tempus et W tempus relativum inter se accommodantur. Curet ut Phase series motoris certo permutari possit cum duo contactores agunt, wiring constare debet in superiore portu contactus, et Phase ad inferiorem portum contactoris accommodetur. Ob consecutionem periodi permutatio duorum graduum, necesse est ut duo KM orbiculi simul in unum effici non possint, alioquin gravissima periodus ad brevitatem ambitum vitiorum evenire potest. Ergo interlocking adhibenda est.
Propter rationes securitatis, duplex interlocking praetura et vicissim imperium circuitionis cum globulis interlocking (mechanicis) et contactoris interlocking (electrica) saepe adhibetur; Utendo puga interlocking, etsi bullae anteriores et adversae simul pressae sunt, duo contactores ad tempus temperatio adhibiti simul in possibilitate non possunt, tempus mechanice vitantes ad breves circuitus evitandum.
Praeterea, propter interclusionem contactorum applicatorum, dum unus e contactoribus potestas est, longus eius contactus clausis non claudet. Hoc modo, in applicatione duplicis mechanicae et electricae interlocking, potentia copia systematis motoris non potest habere periodum ad breves circuitus Phase, efficaciter tuendi motores et casus evitandi causarum periodi ad brevium circuitus Phase in periodo modulationis, quae exurere potest. contactor.
Post tempus: Aug-07-2023


