
Asynchronus triphasicusmotorEst genus motoris inductionis quod simul coniuncta currenti alterna triphasica 380V (differentia phasium 120 graduum) potentiam accipit. Quia campi magnetici rotantes rotoris et statoris motoris asynchroni triphasici in eadem directione et celeritate diversa rotantur, lapsus est, itaque motor asynchronus triphasicus appellatur.
Celeritas rotoris motoris asynchroni triphasici minor est quam celeritas campi magnetici rotantis. Convolutio rotoris vim electromotricem et currentem generat propter motum relativum cum campo magnetico, et cum campo magnetico interagit ut momentum electromagneticum generet, transformationem energiae efficiens.
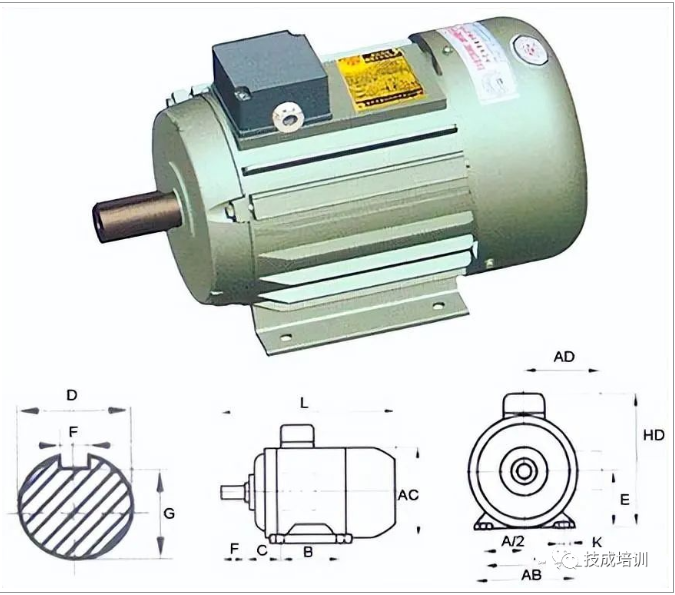
Comparatum cum asynchrono monophasicomotores, asynchronus triphasicusmotoresmeliorem operationem habent et varias materias servare possunt.
Secundum diversas structuras rotoris, motores asynchroni triphasici in genus caveae et genus involutum dividi possunt.
Motor asynchronus cum rotore caveali structuram simplicem, operationem certam, pondus leve, et pretium vile habet, quae late in usu sunt. Eius vitium principale est difficultas in celeritate regulanda.
Rotor et stator motoris asynchroni triphasici etiam convolutis triphasicis instructi sunt et per anulos labentes et penicillorum rheostato externo connexi sunt. Resistentia rheostati adaptata potest efficaciam initiandi motoris emendare et celeritatem motoris accommodare.
Principium operationis motoris asynchroni triphasici
Cum fluxus alternans triphasicus symmetricus ad convolutionem statoris triphasicam applicatur, campus magneticus rotans generatur, qui dextra versus secundum spatium circulare interius statoris et rotoris celeritate synchrona n1 rotatur.
Cum campus magneticus rotans celeritate n1 rotetur, conductor rotoris initio immobilis est, ergo conductor rotoris campum magneticum rotantem statoris secabit ut vim electromotricem inductam generet (directio vis electromotricis inductae regula manus dextrae determinatur).
Ob circuitum brevem in utroque extremo conductoris rotoris per anulum circuitus brevis, sub actione vi electromotricis inductae, conductor rotoris currentem inductum generabit qui fere in eadem directione ac vis electromotrix inducta est. Conductor currentem portans rotoris vi electromagneticae in campo magnetico statoris subicitur (directio vis regula sinistrae determinatur). Vis electromagnetica momentum electromagneticum in axe rotoris generat, rotorem ad rotandum in directione campi magnetici rotantis impellit.
Per analysin supra dictam concludi potest principium operationis motoris electrici hoc esse: cum convolutiones statoricae triphasicae motoris (quae singulae cum differentia anguli electrici 120 graduum) currente alternante symmetrico triphasico aluntur, campus magneticus rotans generatur, qui convolutionem rotoris secat et currentem inductum in convolutione rotoris generat (convolutio rotoris circuitus clausus est). Conductor rotoris currentem portans vim electromagneticam sub actione campi magnetici statoris rotantis generat. Itaque momentum electromagneticum in axe motoris formatur, motorem ad rotandum in eadem directione ac campus magneticus rotans impellit.
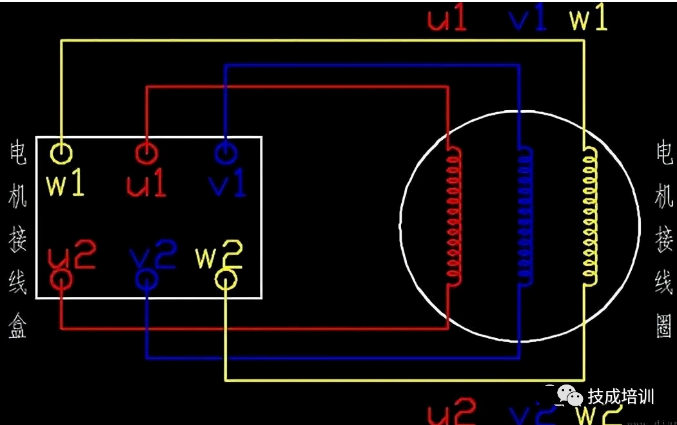
Schema filorum motoris asynchroni triphasici
Nexus fundamentalis motorum asynchronorum triphasium:
Sex fila ex convolutione motoris asynchroni triphasici in duos modos connexionis principales dividi possunt: connexionem delta delta et connexionem stellae.
Sex fila = tres spirae motoris = tres capita + tres caudae, cum multimetro nexum inter caput et caudam eiusdem spirae metiente, id est U1-U2, V1-V2, W1-W2.
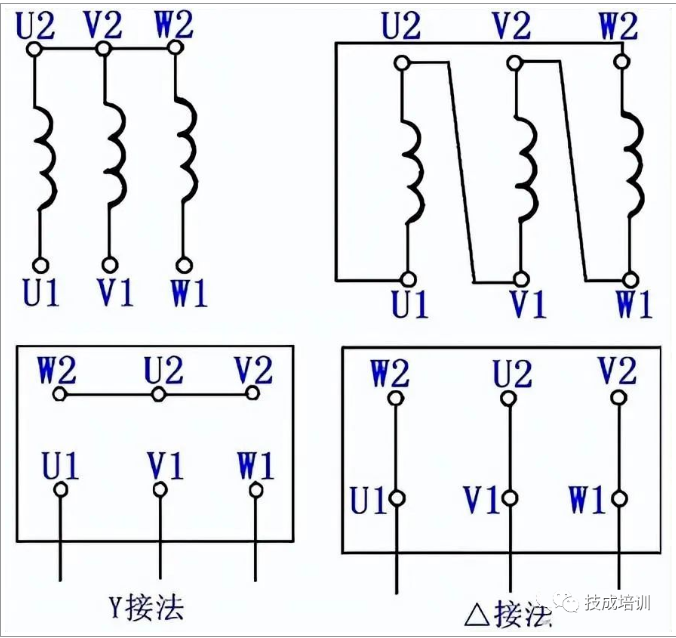
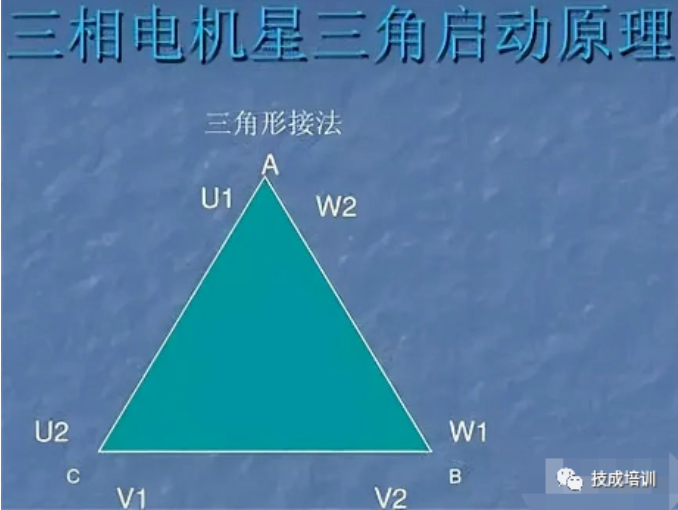
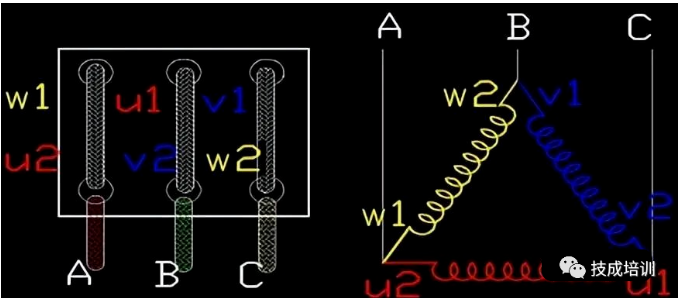
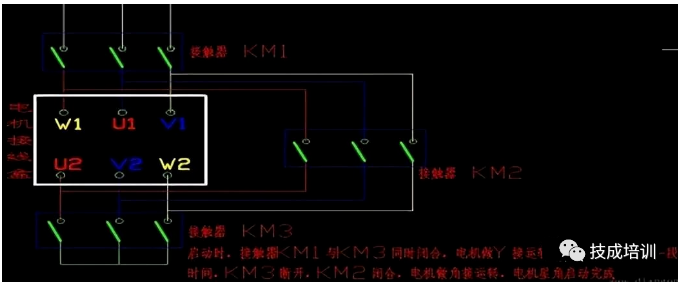
1. Methodus connexionis triangularis delta pro motoribus asynchronis triphasicis
Methodus connexionis triangularis delta est capita et caudas trium spirarum ordine coniungere ad triangulum formandum, ut in figura demonstratur:
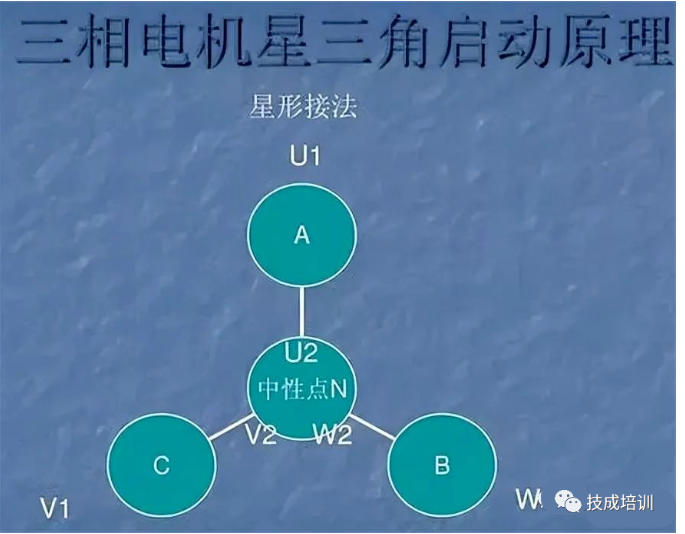
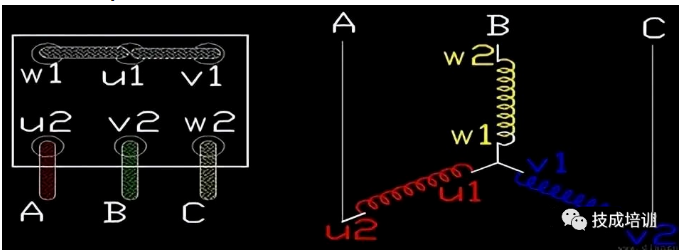
2. Modus connexionis stellaris pro motoribus asynchronis triphasicis
Modus connexionis stellaris est ut extremitates caudae vel capitae trium spirarum coniungantur, reliquis tribus filis ut nexibus potentiae utantur. Modus connexionis ut in figura demonstratur:
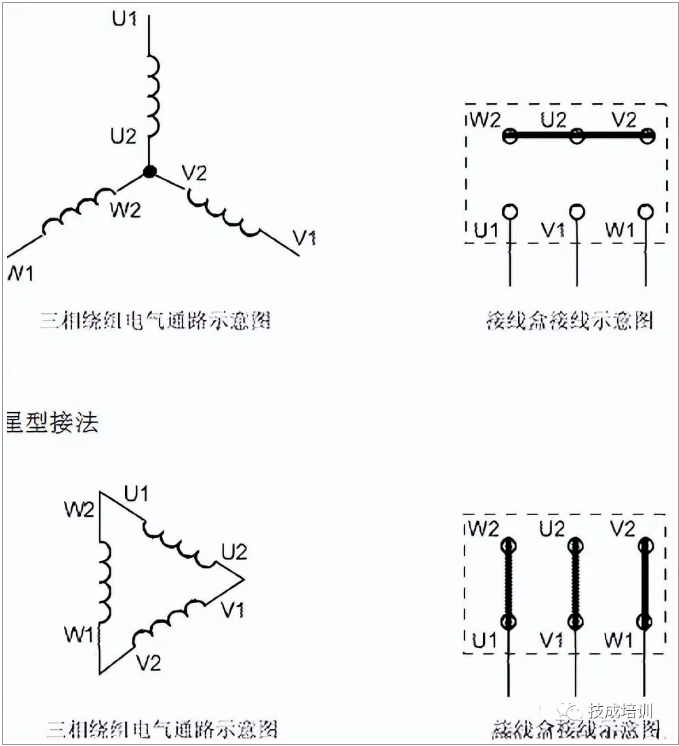
Explicatio Schematis Filorum Motoris Asynchroni Triphasis in Figuris et Textu
Arca iuncturae motoris triphasici
Cum motor asynchronus triphasicus connectitur, modus connexionis partis connectivae in arca iuncturae est ut sequitur:
Cum motor asynchronus triphasicus angulariter coniunctus est, modus connexionis partis coniunctionis arcae iuncturae est ut sequitur:
Duae sunt rationes connexionis motorum asynchronorum triphasium: conexio stellaris et conexio triangularis.
Methodus triangulationis
In spiralibus convolutoriis eadem tensione et diametro fili, methodus connexionis stellaris ter pauciores vices per phasem (1.732 vicibus) et ter minorem potentiam quam methodus connexionis triangularis habet. Methodus connexionis motoris perfecti ad tensionem 380V sustinendam definita est et plerumque modificationi non apta est.
Modus connexionis mutari potest tantum cum tensio trium phasium a normali 380V differt. Exempli gratia, cum tensio trium phasium 220V est, mutatio modi connexionis stellae tensionis trium phasium originalis 380V ad modum connexionis triangulares adhiberi potest; cum tensio trium phasium 660V est, modus connexionis triangle tensionis trium phasium originalis 380V ad modum connexionis stellae mutari potest, et potentia eius immutata manet. Generaliter, motores parvae potentiae stella connectuntur, dum motores magnae potentiae triangle connectuntur.
Sub tensione nominali, motor conexus delta adhibendus est. Si ad motorem stellae conexum mutatur, ad operationem tensionis reductae pertinet, quod efficit ut potentia motoris et currentis initialis minuantur. Cum motor magnae potentiae (methodus connexionis delta) incipitur, currentis maximus est. Ut effectus currentis initialis in lineam minuatur, initium gradatim deorsum fere adhibetur. Una methodus est mutare methodum connexionis delta originalem ad methodum connexionis stellae ad incipiendum. Postquam methodus connexionis stellae incepta est, rursus ad methodum connexionis delta convertitur ad operandum.
Schema filorum motoris asynchroni triphasici
Schema physicum linearum translationis directae et inversae pro motoribus asynchronis triphasicis:
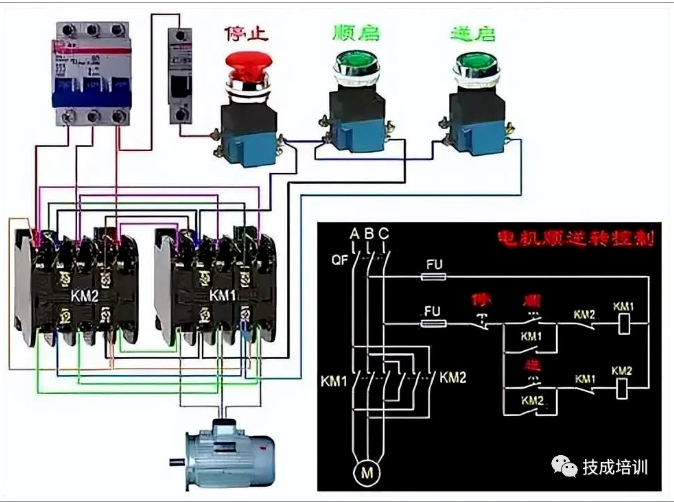
Ad gubernationem motoris directam et inversam efficiendam, duae phases quaelibet potentiae eius inter se aptari possunt (quod commutationem appellamus). Plerumque, phasis V immutata manet, phasis U et phasis W inter se aptantur. Ut ordo phasium motoris certo commutari possit cum duo contactores agunt, filorum conexio in superiore portu contactus congruens esse debet, et phasis in inferiore portu contactoris aptanda est. Propter commutationem ordinis phasium duarum phasium, necesse est curare ne duae bobinae KM simul potentiam accipere possint, alioquin gravia vitia brevis circuitus inter phases fieri possunt. Ergo, interclusiones adhibendae sunt.
Ob rationes salutis, saepe duplex interclusio circuitus moderandi directionem et retrocessionem cum interclusione puga (mechanica) et interclusione contactorum (electrica) adhibetur; interclusione puga, etiam si puga directionem et retrocessionem simul premantur, duo contactores ad phasis adaptandam adhibiti simul accenderi non possunt, mechanice vitando circuitus breves inter phases.
Praeterea, propter interconnectionem contactorum applicatorum, quamdiu unus ex contactoribus potentia electrica manet, eius contactus diu clausus non claudetur. Hoc modo, in applicatione interconnectionis duplicis mechanicae et electricae, systema potentiae motoris non potest habere circuitus breves inter phases, motorem efficaciter protegens et accidentia vitans quae a circuitibus brevibus inter phases durante modulatione phasium oriuntur, quae contactorem urere possunt.
Tempus publicationis: VII Augusti, MMXXIII


